伺服驱动器的参数设置是确保伺服系统精确、高效运行的关键,以下是对伺服驱动器参数设置的详细分析:
关键参数设置
1、位置比例增益:
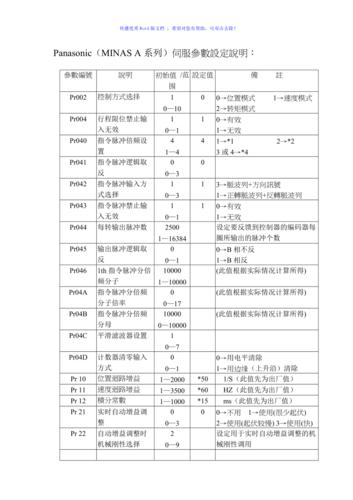
设定位置环调节器的比例增益,影响系统的刚度和响应速度。
增益越高,刚度越大,位置滞后量越小,但过大可能引起振荡或超调。
2、位置前馈增益:
设定位置环的前馈增益,提高高速响应特性,但可能降低系统稳定性。
不需要高响应时,此参数通常设为0。
3、速度比例增益:
设定速度调节器的比例增益,影响速度环的刚度。
负载惯量越大,设定值应越大,以保持系统稳定。
4、速度积分时间常数:
设定速度调节器的积分时间常数,决定积分速度。
负载惯量越大,设定值应适当增大,以避免振荡。
5、速度反馈滤波因子:
设定速度反馈低通滤波器特性,影响电机噪音和响应速度。
数值越大,截止频率越低,噪音越小,但响应变慢。
6、最大输出转矩设置:
设置伺服驱动器的内部转矩限制值,防止过载。
定位完成范围设定位置控制方式下的定位完成脉冲范围。
7、手动调整增益参数:
包括速度比例增益KVP、积分增益KVI、微分增益KVD等。
通过手动调整这些参数,可以优化系统的动态性能和稳定性。
8、自动调整增益参数:
现代伺服驱动器通常提供自动增益调整功能,简化参数设置过程。
根据实际需求选择不同的控制响应等级进行自动调整。
其他重要参数及调整方法
1、报警代码与监视参数:
了解并处理常见的报警代码,如正极限报警、负极限报警等。
使用H0B组参数监视电机状态,如实际转速、当前绝对位置等。
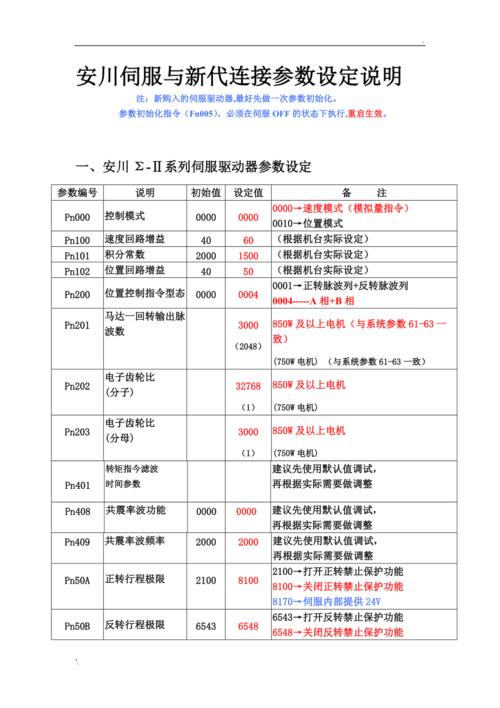
2、电子齿轮比设置:
根据编码器分辨率和电机转一圈使用的脉冲数来设置电子齿轮比。
确保电子齿轮比设置正确,以保证控制系统能够精确地将电机的步进或旋转转换为负载的所需运动。
3、刚性调整:
对于新电机或非首次使用的电机,可能需要调整刚性以消除啸叫或停顿现象。
通过调整加减速时间等参数来改善机器抖动问题。
4、连接与通讯设置:
确保伺服驱动器与控制器(如PLC)之间的连接正确无误。
根据需要设置IP地址、通讯协议等参数以确保通讯畅通。
伺服驱动器的参数设置涉及多个方面,包括位置控制、速度控制、转矩限制以及自动调整功能等,在实际操作中,应根据具体的应用需求和系统条件进行合理设置和调整,注意参考伺服驱动器的使用手册和技术文档以获取更详细的信息和指导。








评论列表 (2)
伺服驱动器参数设置需考虑精度、响应时间及负载能力等多方面因素。
2025年04月29日 08:52伺服驱动器参数设置,精准调控不可或缺的关键步骤。
2025年05月14日 07:02