CAN(Controller Area Network)是一种广泛应用于汽车、工业自动化等领域的串行通信协议,CAN设置主要包括以下几个方面:
1、波特率(Baud Rate):波特率是衡量通信速度的一个参数,表示每秒传输的位数,在CAN通信中,常见的波特率有10kbps、20kbps、50kbps、100kbps、125kbps等,选择合适的波特率需要根据实际应用的需求和硬件性能来确定。
2、采样点(Sampling Point):采样点是指接收端在每个位周期内对信号进行采样的时刻,在CAN通信中,采样点通常设置在位周期的75%处,即信号的下降沿之后,这样可以确保接收到的信号稳定可靠。
3、同步跳转宽度(Synchronization Jump Width):同步跳转宽度是指在总线上出现连续的相同电平信号时,接收端需要进行同步调整的时间间隔,这个参数主要用于消除由于信号传输延迟和噪声干扰导致的错误,同步跳转宽度的值通常设置为1个位周期。
4、错误检测与处理(Error Detection and Handling):CAN协议具有强大的错误检测与处理能力,包括位错误、填充错误、CRC错误、形式错误和应答错误等,当检测到错误时,发送端会重新发送错误的数据帧,直到接收端正确接收为止,接收端也会对接收到的数据帧进行校验,确保数据的完整性和正确性。
5、地址分配(Address Assignment):在CAN网络中,每个节点都有一个唯一的标识符(ID),用于区分不同的节点,标识符可以是11位的标准格式,也可以是29位的扩展格式,在实际应用中,需要根据网络的规模和需求来合理分配地址空间。
6、消息过滤(Message Filtering):为了提高通信效率,CAN协议支持消息过滤功能,发送端可以根据接收端的地址和标识符来决定是否发送数据帧;接收端则可以根据自己的需求来选择接收哪些数据帧,这样可以避免不必要的数据传输,减轻总线负载。
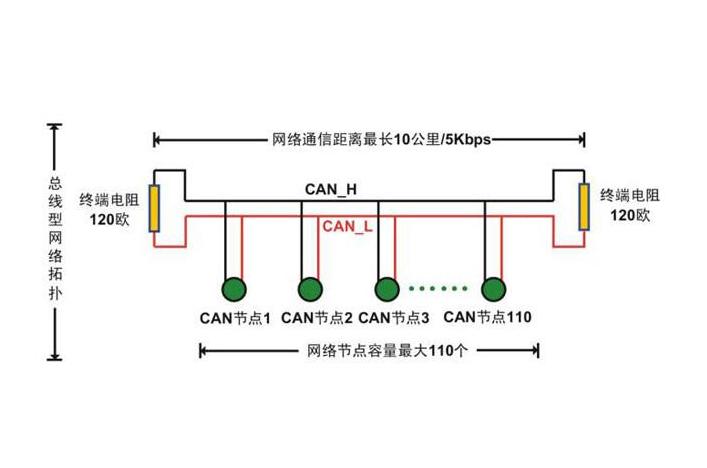
7、总线拓扑(Bus Topology):CAN网络可以采用多种总线拓扑结构,如线性拓扑、星型拓扑和环形拓扑等,在选择总线拓扑时,需要考虑网络的规模、成本和可靠性等因素,通常情况下,线性拓扑适用于小规模的网络,而星型拓扑和环形拓扑适用于大规模的网络。
8、电源与接地(Power Supply and Grounding):CAN网络的电源和接地设计对于保证通信质量至关重要,在实际应用中,需要确保电源的稳定性和接地的良好性,以避免电磁干扰和信号衰减等问题,还需要注意电源线的布局和连接方式,以减小环路面积和电磁辐射。








评论列表 (3)
在CAN设置中,确保正确配置波特率、滤波器和节点地址,以保证通信稳定和可靠。
2025年05月23日 10:56CAN设置需注意波特率、帧格式和节点地址等关键参数。
2025年08月12日 22:31CAN是一种广泛应用于汽车、工业自动化等领域的串行通信协议,其设置包括波特率选择等,通过设置合适的参数如采样点及同步跳转宽度确保信号稳定可靠;具有强大的错误检测与处理能力保障数据完整性并提升网络可靠性通过合理的地址分配和消息过滤提高通讯效率不同总线拓扑结构适应不同的网络环境电源接地设计对保证质量至关重要图片来源见水印侵删版权声明如需更多信息请查阅相关资料或咨询专业人士
2025年10月31日 05:52