微云全息(NASDAQ:HOLO)是一家专注于激光雷达和全息技术的创新公司,其点云降噪算法为单光子激光雷达数据进行实时3D全息重建提供了强大的支持,这款应用软件在自动驾驶、机器人导航、安防监控等领域具有广泛的应用前景,本文将详细介绍这款应用软件的技术原理、功能特点以及应用场景。
技术原理
1、单光子激光雷达技术
单光子激光雷达(Single Photon Lidar,简称SPL)是一种基于量子力学原理的激光雷达技术,与传统的激光雷达相比,单光子激光雷达具有更高的灵敏度和分辨率,能够在极低的光强下检测到目标物体,这使得单光子激光雷达在复杂环境下具有更好的性能表现,尤其适用于夜间、雾霾等低能见度场景。
2、点云降噪算法
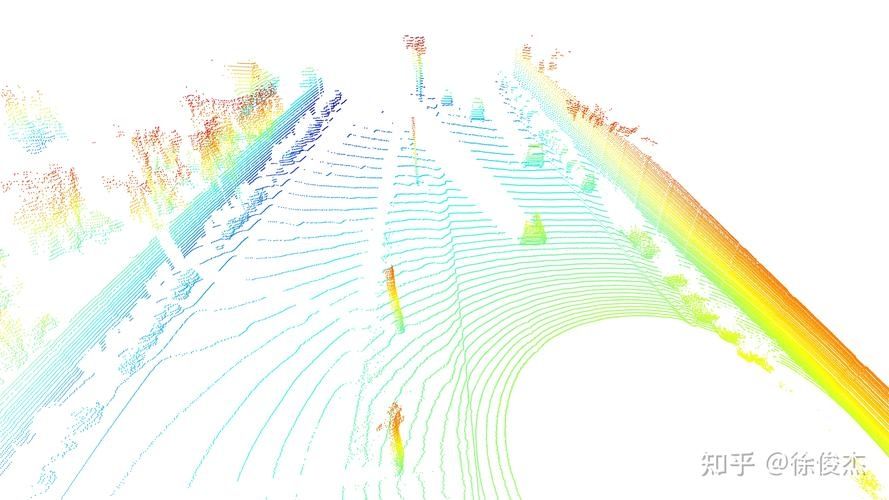
点云降噪算法是微云全息应用软件的核心部分,其主要任务是对单光子激光雷达采集到的原始点云数据进行去噪处理,以提高数据的质量和可靠性,该算法主要包括以下几个步骤:
(1)预处理:对原始点云数据进行滤波、平滑等操作,消除噪声和异常值。
(2)特征提取:从预处理后的点云数据中提取有用的特征信息,如边缘、角点等。
(3)数据融合:将多个传感器的数据进行融合,提高数据的完整性和准确性。
(4)后处理:对融合后的数据进行进一步优化,如去除冗余点、填充缺失区域等。
3、实时3D全息重建
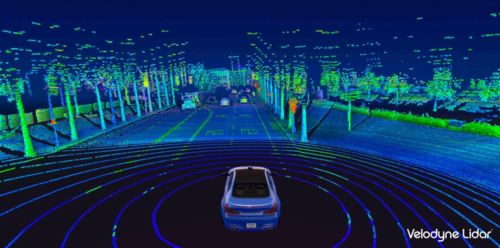
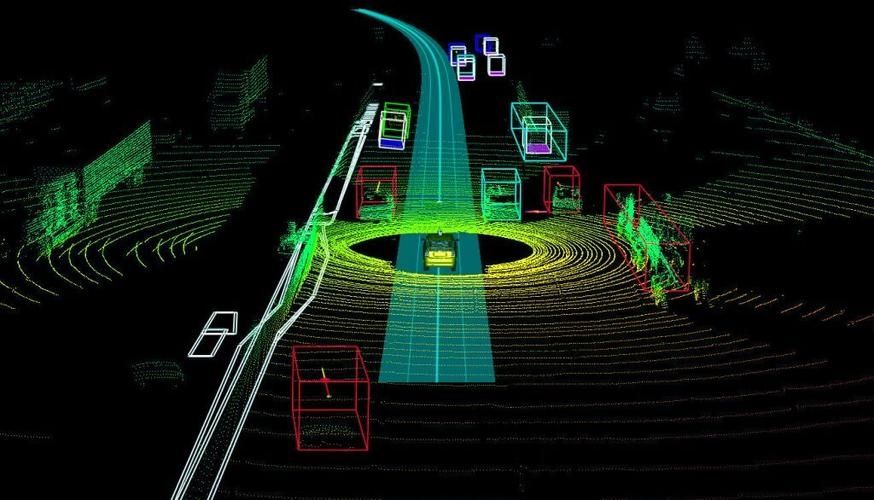
实时3D全息重建是将处理后的点云数据转换为三维全息图像的过程,微云全息应用软件采用先进的计算机视觉技术和图形学算法,实现了高效的实时3D全息重建,用户可以通过软件界面实时查看重建后的三维全息图像,从而更直观地了解场景中的物体分布和空间关系。
功能特点
1、高精度测量
微云全息应用软件结合了单光子激光雷达的高灵敏度和点云降噪算法的高效性,实现了对目标物体的高精度测量,在实际应用中,用户可以获取到毫米级别的测量精度,满足各种高精度需求。
2、实时性强
通过优化算法和硬件加速技术,微云全息应用软件实现了对单光子激光雷达数据的实时处理和3D全息重建,用户可以在短时间内获得高质量的三维全息图像,为后续的决策和控制提供有力支持。
3、适应性强
微云全息应用软件具有较强的环境适应性,能够在不同光照、天气和场景条件下稳定工作,软件还支持多种类型的激光雷达传感器,方便用户根据实际需求选择合适的设备。
4、易于集成
微云全息应用软件提供了丰富的接口和开发工具,方便用户将其集成到现有的系统和平台中,软件还支持与其他传感器和应用软件的协同工作,实现多源数据融合和综合分析。
应用场景
1、自动驾驶
在自动驾驶领域,微云全息应用软件可以为车辆提供高精度的环境感知能力,帮助车辆实现自主导航、避障和路径规划等功能,通过实时3D全息重建,驾驶员可以更直观地了解周围环境,提高驾驶安全性。
2、机器人导航
在机器人导航领域,微云全息应用软件可以帮助机器人实现精确的定位和地图构建,通过实时3D全息重建,机器人可以更好地识别障碍物和目标物体,提高导航效率和准确性。
3、安防监控
在安防监控领域,微云全息应用软件可以实现对场景的全方位监控和实时分析,通过实时3D全息重建,安保人员可以更清晰地了解现场情况,及时发现异常行为和潜在威胁。
4、工业检测
在工业检测领域,微云全息应用软件可以帮助企业实现对产品质量的精确检测和评估,通过实时3D全息重建,企业可以更直观地了解产品的内部结构和表面缺陷,提高生产效率和质量管理水平。
微云全息(NASDAQ:HOLO)点云降噪算法为单光子激光雷达数据进行实时3D全息重建的应用软件具有高精度、实时性强、适应性强和易于集成等特点,广泛应用于自动驾驶、机器人导航、安防监控和工业检测等领域,随着技术的不断发展和完善,相信这款应用软件将在更多领域发挥重要作用,为人们的生活和工作带来更多便利。








评论列表 (1)
微云全息应用软件采用单光子激光雷达技术和点去降噪算法,实现实时3D全景重建,具有高精度测量、快速响应和适应性强等特点广泛应用于自动驾驶等领域为人们的生活和工作带来便利化革新未来前景广阔值得期待!
2025年06月18日 17:17